
TransAmerica
A trip I took after finishing undergrad. The Google route shown below only approximates my route. All told, I rode 4500 miles over 90 days from Seattle, WA to New Orleans, LA. That averages to 50mi/day, but the beginning and ending mileages were closer to 25mi/day and 75mi/day, respectively. There was one 100mi day (a century) and rest days roughly once per week.

Electroimpact (Full-Time Project Engineer)
Magnetic Beam PID Control (Class Project)
Ipsum lorem
SPLIT (Autonomous Vehicle)
Ipsum Lorem
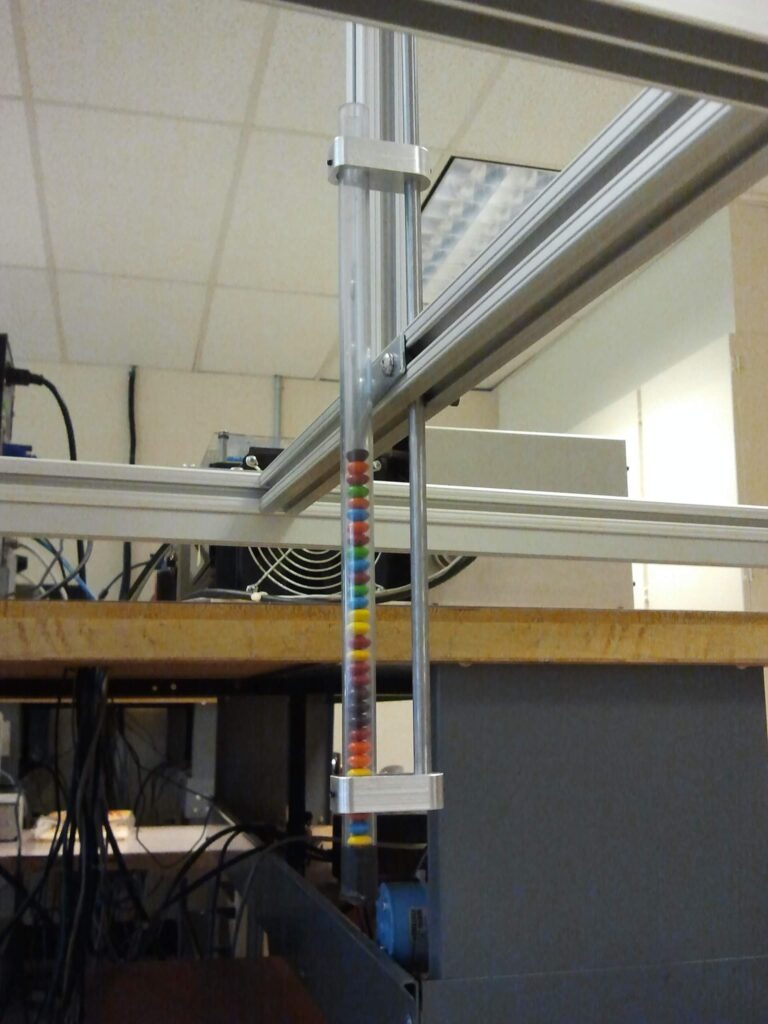
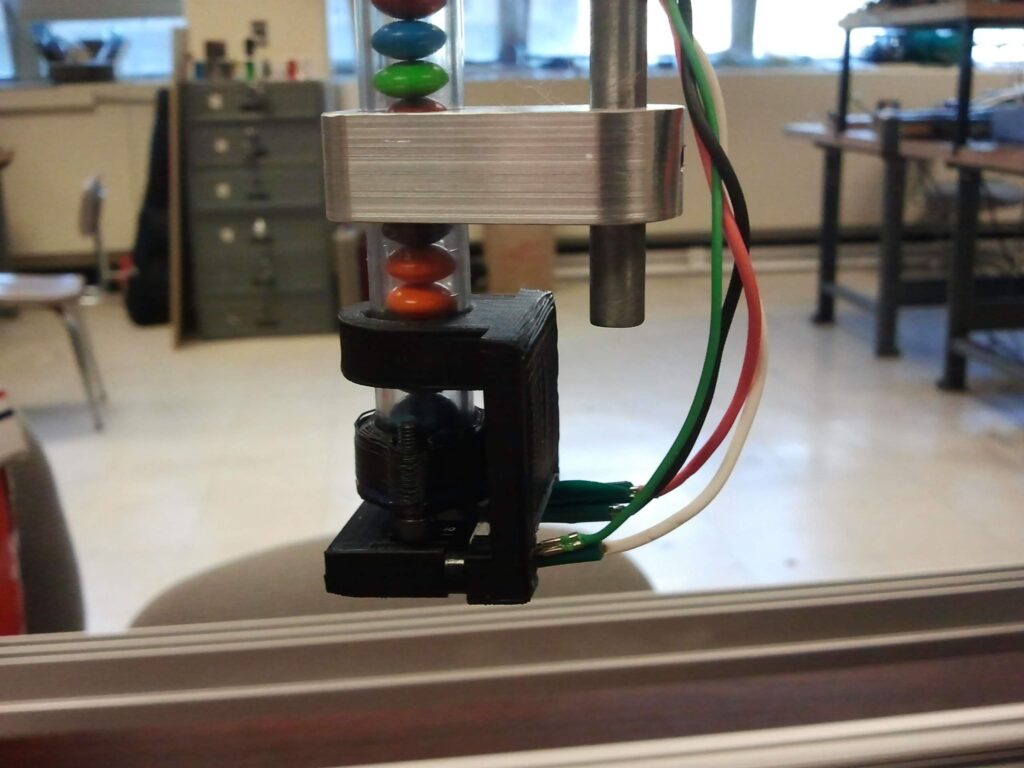
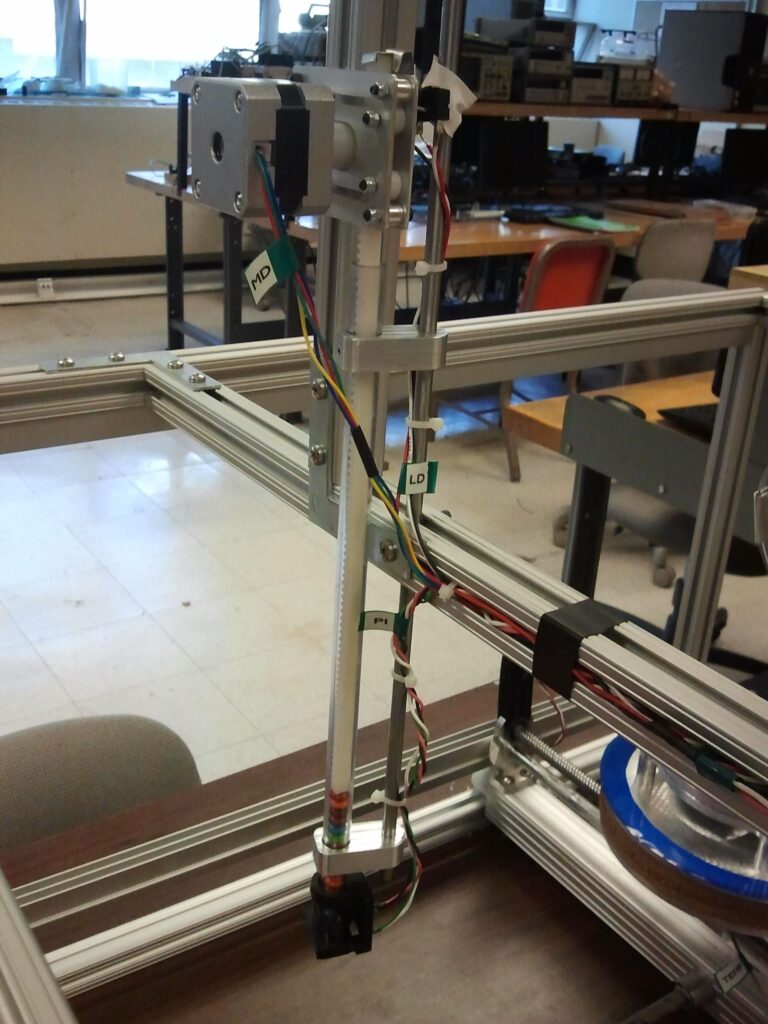
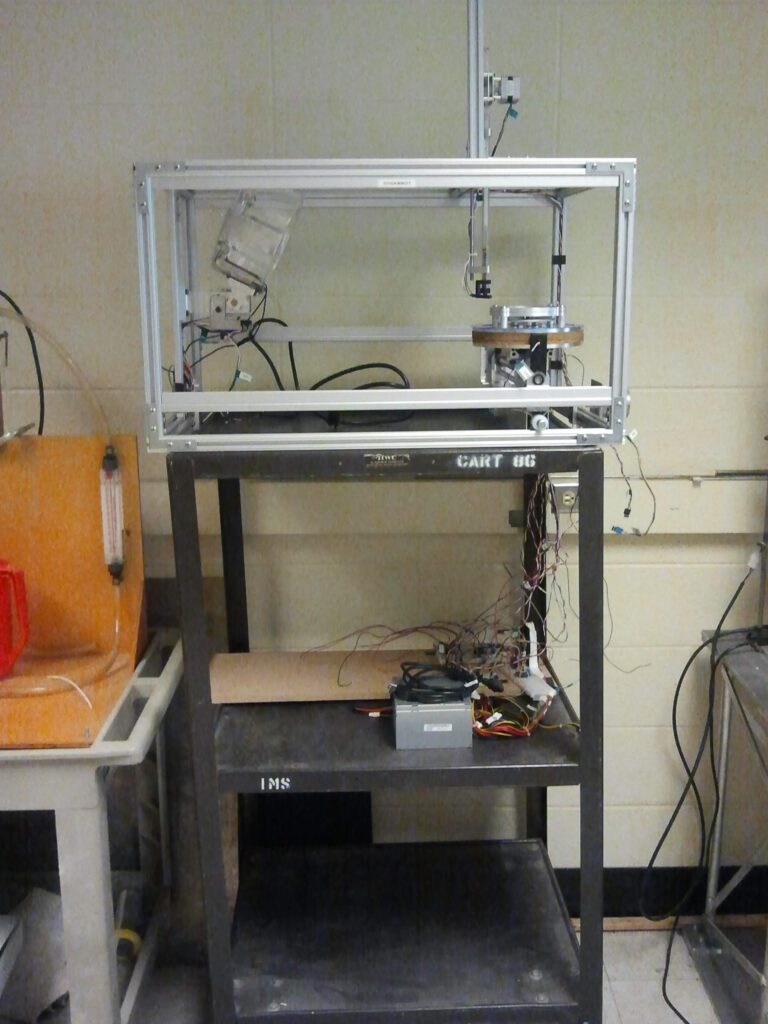
Candy Sorter
The goal of this project was to design a simple mechatronic device that undergraduate students could code for a final class project. All of the electrical layout and mechanical parts are provided to allow for quick assembly of the physical device. The challenge is in programming an LED array, resistor ADC, and two servomotors to work in sequence such that an operator can input candy and have it sorted by color. State machines suddenly appear useful practically when presented with managing the logic for such a device! An inherent data analytics problem also exists in how to train the device to recognize colors based on sensor measurements. I would love to see someone make a hardware training sequence that first samples many measurements of varying input candies and then decides for itself how to cluster!
This project was conceived and executed independently of CookieBot, but still makes an awesome conceptual connection for adding capabilities for color candy printing on that project!

The sorting results. Not bad!
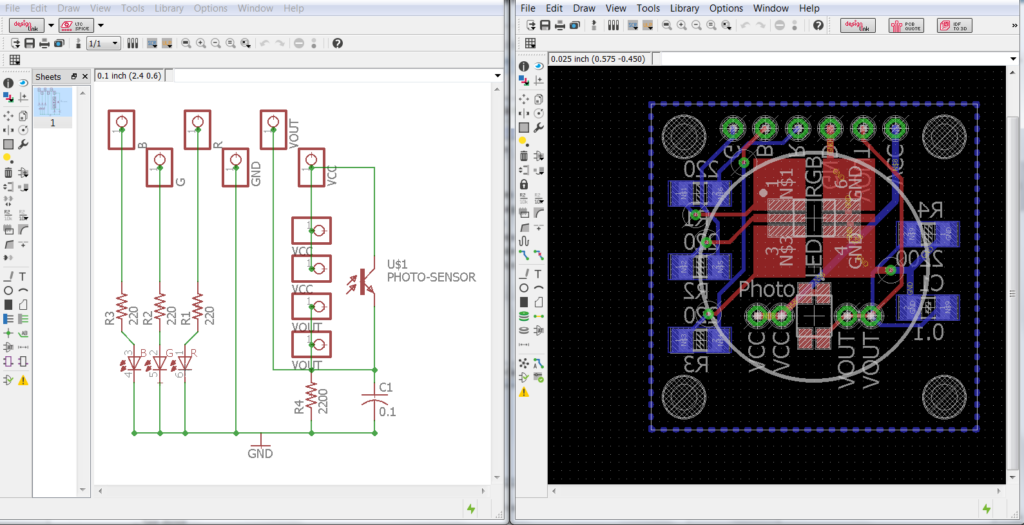
Sensor PCB design schematic and board
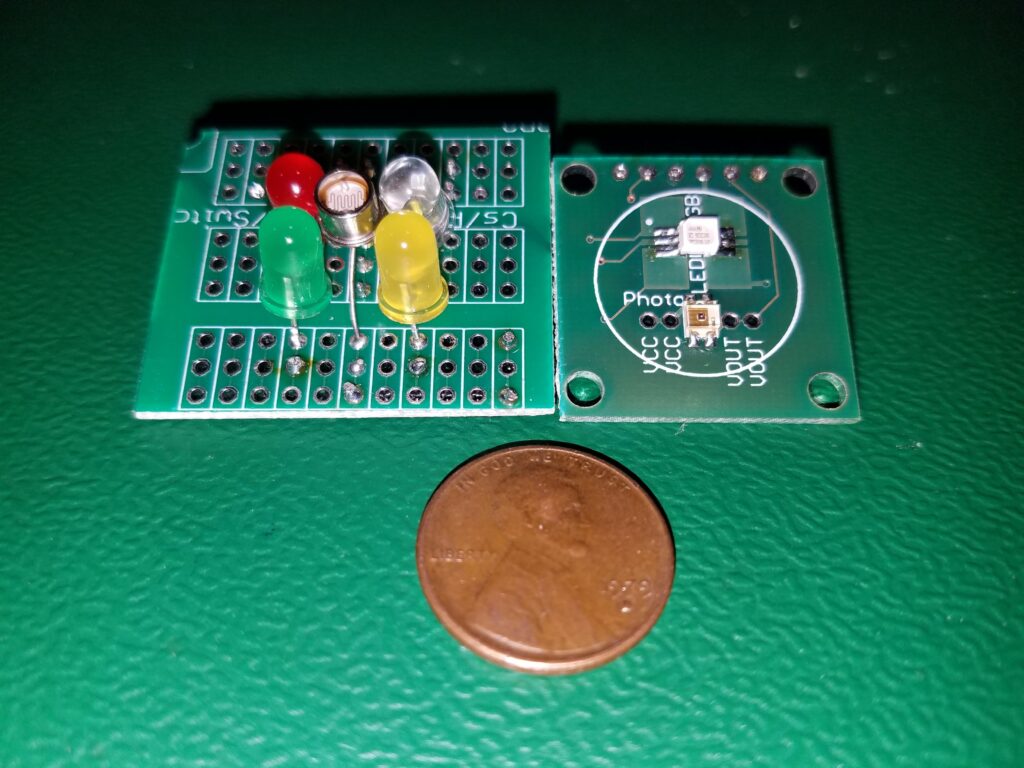
Prototype vs production: front 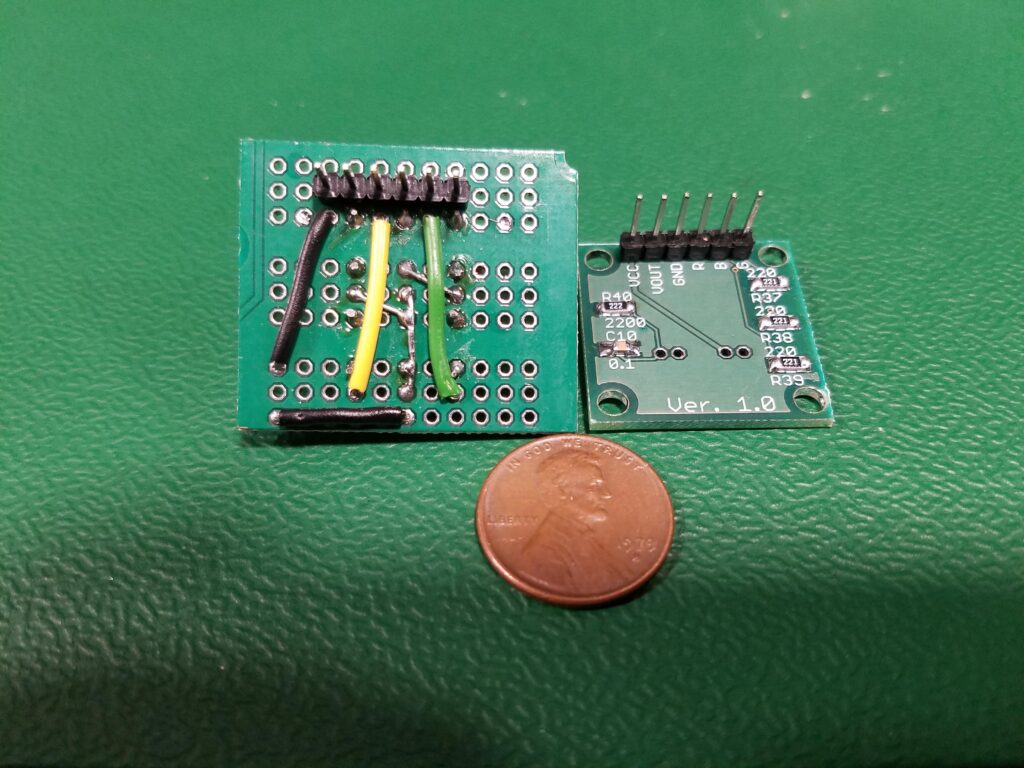
Prototype vs production: back
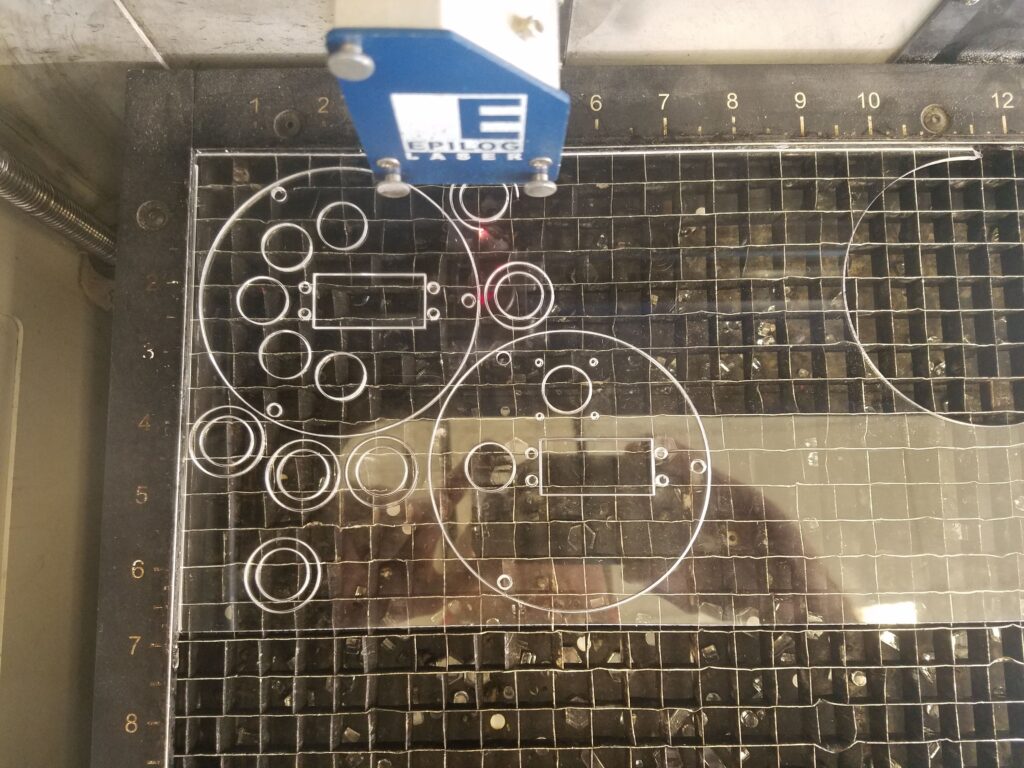
Laser cutting the acrylic parts
Assembly drawings were made as instructions for both soldering together the light sensor and bolting together the final assembly.

Mananaan (CAD + 3D Printing)
Ipsum lorem



Ultra-Wideband (UWB) Localization (Graduate Research)
Bicycles Built (Hobby)
Black Diamond
Omnibus
Champion Stumpy
Raleigh Cruiser
Sekai SingleSpeed
Frankenstein Fixie
Electric Conversion
Phantom Pedal
Snoozaru
Ipsum Lorem